|  I was asked to help out a group of high-school seniors, with their
advanced physics project druing the winter of 2001. This was a rather
busy year for them (getting all their college applications ready, etc.)
and so they had left themselves very little time to do a "robotics"
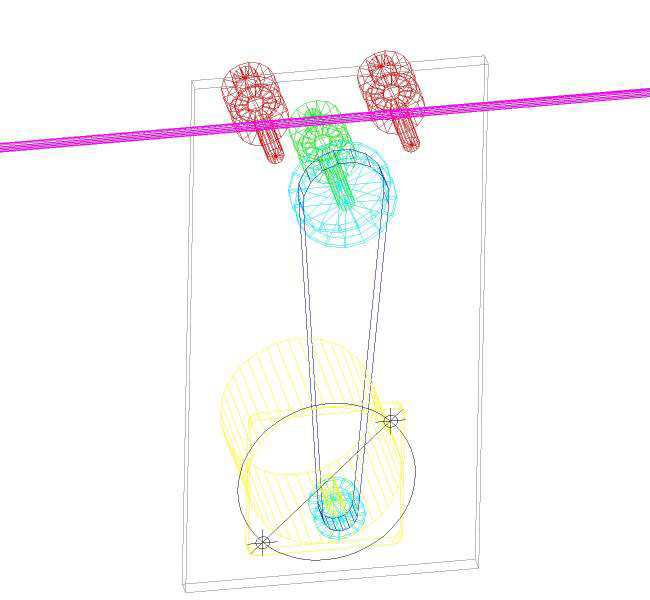
performance. We tried to distill things down to the simplest possible
scheme: one stepper motor, controlling the bot's position on a strung
cable (see right). I was asked to help out a group of high-school seniors, with their
advanced physics project druing the winter of 2001. This was a rather
busy year for them (getting all their college applications ready, etc.)
and so they had left themselves very little time to do a "robotics"
performance. We tried to distill things down to the simplest possible
scheme: one stepper motor, controlling the bot's position on a strung
cable (see right).
We decided to add a solenoid, which would magnetically carry a payload
(candy bar) over the crowd, and then release it (hence the name).

construction |

testing |

performance |
|
|